
Page 139 - Acalán 121
P. 139
Julio - Diciembre Acalán 121 43
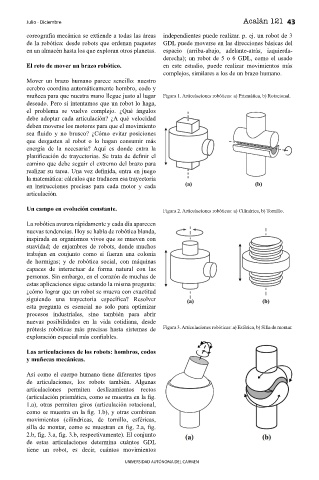
coreografía mecánica se extiende a todas las áreas independientes puede realizar. p. ej. un robot de 3
de la robótica: desde robots que ordenan paquetes GDL puede moverse en las direcciones básicas del
en un almacén hasta los que exploran otros planetas. espacio (arriba-abajo, adelante-atrás, izquierda-
derecha); un robot de 5 o 6 GDL, como el usado
El reto de mover un brazo robótico. en este estudio, puede realizar movimientos más
complejos, similares a los de un brazo humano.
Mover un brazo humano parece sencillo: nuestro
cerebro coordina automáticamente hombro, codo y
muñeca para que nuestra mano llegue justo al lugar Figura 1. Articulaciones robóticas: a) Prismática, b) Rotacional.
deseado. Pero si intentamos que un robot lo haga,
el problema se vuelve complejo. ¿Qué ángulos
debe adoptar cada articulación? ¿A qué velocidad
deben moverse los motores para que el movimiento
sea f uido y no brusco? ¿Cómo evitar posiciones
que desgasten al robot o lo hagan consumir más
energía de la necesaria? Aquí es donde entra la
planif cación de trayectorias. Se trata de def nir el
camino que debe seguir el extremo del brazo para
realizar su tarea. Una vez def nida, entra en juego
la matemática: cálculos que traducen esa trayectoria
en instrucciones precisas para cada motor y cada
articulación.
Un campo en evolución constante. Figura 2. Articulaciones robóticas: a) Cilíndrica, b) Tornillo.
La robótica avanza rápidamente y cada día aparecen
nuevas tendencias. Hoy se habla de robótica blanda,
inspirada en organismos vivos que se mueven con
suavidad; de enjambres de robots, donde muchos
trabajan en conjunto como si fueran una colonia
de hormigas; y de robótica social, con máquinas
capaces de interactuar de forma natural con las
personas. Sin embargo, en el corazón de muchas de
estas aplicaciones sigue estando la misma pregunta:
¿cómo lograr que un robot se mueva con exactitud
siguiendo una trayectoria específ ca? Resolver
esta pregunta es esencial no solo para optimizar
procesos industriales, sino también para abrir
nuevas posibilidades en la vida cotidiana, desde
prótesis robóticas más precisas hasta sistemas de Figura 3. Articulaciones robóticas: a) Esférica, b) Silla de montar.
exploración espacial más conf ables.
Las articulaciones de los robots: hombros, codos
y muñecas mecánicas.
Así como el cuerpo humano tiene diferentes tipos
de articulaciones, los robots también. Algunas
articulaciones permiten deslizamientos rectos
(articulación prismática, como se muestra en la f g.
1.a), otras permiten giros (articulación rotacional,
como se muestra en la f g. 1.b), y otras combinan
movimientos (cilíndricas, de tornillo, esféricas,
silla de montar, como se muestran en f g. 2.a, f g.
2.b, f g. 3.a, f g. 3.b, respectivamente). El conjunto
de estas articulaciones determina cuántos GDL
tiene un robot, es decir, cuántos movimientos
UNIVERSIDAD AUTÓNOMA DEL CARMEN