
Page 142 - Acalán 121
P. 142
Acalán 121 46 Julio - Diciembre
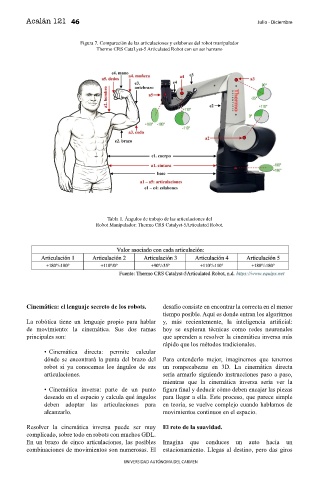
Figura 7. Comparación de las articulaciones y eslabones del robot manipulador
Thermo CRS CataLyst-5 Articulated Robot con un ser humano
Tabla 1. Ángulos de trabajo de las articulaciones del
Robot Manipulador: Thermo CRS Catalyst-5Articulated Robot.
Cinemática: el lenguaje secreto de los robots. desafío consiste en encontrar la correcta en el menor
tiempo posible. Aquí es donde entran los algoritmos
La robótica tiene un lenguaje propio para hablar y, más recientemente, la inteligencia artif cial:
de movimiento: la cinemática. Sus dos ramas hoy se exploran técnicas como redes neuronales
principales son: que aprenden a resolver la cinemática inversa más
rápido que los métodos tradicionales.
• Cinemática directa: permite calcular
dónde se encontrará la punta del brazo del Para entenderlo mejor, imaginemos que tenemos
robot si ya conocemos los ángulos de sus un rompecabezas en 3D. La cinemática directa
articulaciones. sería armarlo siguiendo instrucciones paso a paso,
mientras que la cinemática inversa sería ver la
• Cinemática inversa: parte de un punto f gura f nal y deducir cómo deben encajar las piezas
deseado en el espacio y calcula qué ángulos para llegar a ella. Este proceso, que parece simple
deben adoptar las articulaciones para en teoría, se vuelve complejo cuando hablamos de
alcanzarlo. movimientos continuos en el espacio.
Resolver la cinemática inversa puede ser muy El reto de la suavidad.
complicado, sobre todo en robots con muchos GDL.
En un brazo de cinco articulaciones, las posibles Imagina que conduces un auto hacia un
combinaciones de movimientos son numerosas. El estacionamiento. Llegas al destino, pero das giros
UNIVERSIDAD AUTÓNOMA DEL CARMEN