
Page 140 - Acalán 121
P. 140
Acalán 121 44 Julio - Diciembre
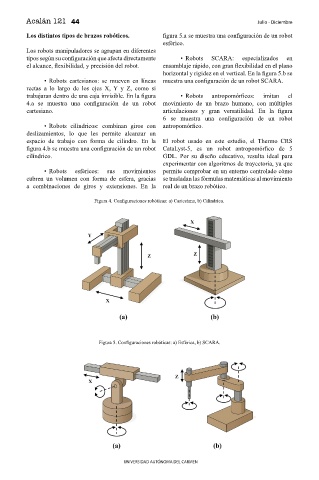
Los distintos tipos de brazos robóticos. f gura 5.a se muestra una conf guración de un robot
esférico.
Los robots manipuladores se agrupan en diferentes
tipos según su conf guración que afecta directamente • Robots SCARA: especializados en
el alcance, f exibilidad, y precisión del robot. ensamblaje rápido, con gran f exibilidad en el plano
horizontal y rigidez en el vertical. En la f gura 5.b se
• Robots cartesianos: se mueven en líneas muestra una conf guración de un robot SCARA.
rectas a lo largo de los ejes X, Y y Z, como si
trabajaran dentro de una caja invisible. En la f gura • Robots antropomórf cos: imitan el
4.a se muestra una conf guración de un robot movimiento de un brazo humano, con múltiples
cartesiano. articulaciones y gran versatilidad. En la f gura
6 se muestra una conf guración de un robot
• Robots cilíndricos: combinan giros con antropomórf co.
deslizamientos, lo que les permite alcanzar un
espacio de trabajo con forma de cilindro. En la El robot usado en este estudio, el Thermo CRS
f gura 4.b se muestra una conf guración de un robot CataLyst-5, es un robot antropomórf co de 5
cilíndrico. GDL. Por su diseño educativo, resulta ideal para
experimentar con algoritmos de trayectoria, ya que
• Robots esféricos: sus movimientos permite comprobar en un entorno controlado cómo
cubren un volumen con forma de esfera, gracias se trasladan las fórmulas matemáticas al movimiento
a combinaciones de giros y extensiones. En la real de un brazo robótico.
Figura 4. Conf guraciones robóticas: a) Cartesiana, b) Cilíndrica.
Figura 5. Conf guraciones robóticas: a) Esférica, b) SCARA.
UNIVERSIDAD AUTÓNOMA DEL CARMEN